

Министерство науки и высшего образования Российской Федерации
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ (НИ ТГУ)
Геолого-географический факультет
Кафедра динамической геологии
Реферат
По дисциплине «Геоинформатика»
на тему «Глобальные системы позиционирования»
Щербакова Татьяна Дмитриевна
Направление: геология 05.03.01
Студент группы №022101
____________
«_____» ____________20__г
Доцент кафедры
динамической геологии
____________И. В. Афонин
«_____» ____________20__г
Томск - 2022
Оглавление
Введение 2
Глобальные системы позиционирования и их принцип работы. 3
Функции, задачи и применение. 7
Применение приборов спутникового позиционирования в прикладных задачах и ГИС 8
Использование спутникового метода для мониторинга природных ресурсов и объектов 8
Использование GPS-оборудования для навигации 9
Использование GPS-оборудования для топографии (приборы дециметрового-метрового уровня точности) 10
Использование GPS геодезического класса (миллиметровый-сантиметровый уровень точности) 11
Геоинформационные системы и управление ресурсами 12
Все системы 12
История GPS 20
История Galileo 22
Применение в быту. 23
Заключение 24
Введение
Существуют две глобальные системы позиционирования - американская Global Positioning Systems (GPS) и советская ГЛОНАСС - Глобальная Навигационная Спутниковая Система. В США также создана американская NAVSTAR - Navigation System with Timing and Ranging - навигационная система, основанная на измерении времени и дальности. Американская система работает в операционном режиме, то есть она в полной мере технически и коммерчески реализована. Геодезист или навигатор, желающий стать пользователем этой системы, может приобрести аппаратуру и программное обеспечение. Приемники и программное обеспечение ГЛОНАСС пока не столь доступны [1].
Одной из самых популярных технологий глобального позиционирования, используемых в современных гаджетах, является Система глобального позиционирования (GPS). С помощью сигналов от спутников, вращающихся на околоземной орбите, приёмник GPS может определить своё местонахождение с удивительной точностью: последнее поколение системы Гражданских навигационных сообщений (CNAV), используемое в американских GPS-навигаторах, определяет координаты с точностью до полуметра. Эти сигналы также содержат информацию о времени с точностью до миллисекунд, что делает их идеальными для автономных регистраторов и систем, которые требуют очень точного времени. Это - комбинация, которая сделала GPS одной из главных технологий эпохи мобильной революции [2].
Цель: прийти к понимаю механизма работы глобальных систем позиционирования на реальных примерах.
Задачи:
Проанализировать механизм работы глобальных систем позиционирования
Проанализировать функции и применение глобальных систем позиционирования
Ознакомиться с историей появления трех глобальных систем позиционирования
Оценить бытовую значимость
Глобальные системы позиционирования и их принцип работы.
Система глоба́льного позициони́рования (англ. Global Positioning System, сокр. GPS; иногда называется ГСМ — глобальная система местоопределения) — радиосистема определения местоположения, использующая навигационные спутники. Такие системы обеспечивают круглосуточную информацию о трехмерном положении, скорости и времени для пользователей, обладающих соответствующим оборудованием (GPS-приемник; Glospace) и находящихся на или вблизи земной поверхности (а иногда и вне ее)[3].
Для получения информации о скорости большинство навигационных приемников используют эффект Доплера. Систему образуют 24 спутника, находящиеся на точно заданных орбитах (рисунок 1). Они передают непрерывные сигналы приемникам на суше, в море, в воздухе и с космосе. GPS служит для определения местоположения, навигации, картографирования, прокладки маршрутов, отсчета времени и синхронизации событий. Орбиты спутников располагаются примерно между 60 градусами северной и южной широты. Этим достигается то, что сигнал от хотя бы некоторых спутников может приниматься повсеместно в любое время.
Приемное устройство GPS использует спутниковые сигналы для измерения расстояния от каждого от четырех (или больше) спутников, которые в этот момент находятся в его поле зрения. Альманах (астрономический календарь) в приемном устройстве, который обновляется корректирующими сигналами со спутников, определяет, где именно находятся сейчас спутники. Зная положение четырех спутников и расстояние до каждого из них, приемник может вычислить скорость своего движения. Стандартные приемники могут фиксировать местоположение с точностью в несколько метров и время — до 1 миллионной секунды. Новейшие приемники имеют точность до нескольких сантиметров.
GPS обеспечивает единый мировой стандарт для измерения пространства и времени. Ее точность позволяет самолетам летать ближе друг к другу, по более прямым маршрутам, повышает безопасность полетов.
Сигнал NAVSTAR содержит т. н. «псевдослучайный код» (PRN - pseudo-random code), эфимерис (ephimeris) и альманах (almanach). Псевдослучайный код служит для идентификации передающего спутника. Все они пронумерованы от 1 до 32 и этот номер показывается на экране GPS-приемника во время его работы. Количество PRN-номеров больше, чем число спутников (24), т. к. это облегчает обслуживание GPS-сети: новый спутник может быть запущен, проверен и введен в эксплуатацию еще до того, как старый выйдет из строя. Такому спутнику просто будет присвоен новый номер (от 1 до 32).
Данные эфимериса, постоянно передаваемые каждым спутником, содержат такую важную информацию, как состояние спутника (рабочее или нерабочее), текущая дата и время. Данные альманаха говорят о том, где в течение дня должны находиться все GPS-спутники. Каждый из них передает альманах, содержащий параметры своей орбиты, а также всех других спутников системы.
Д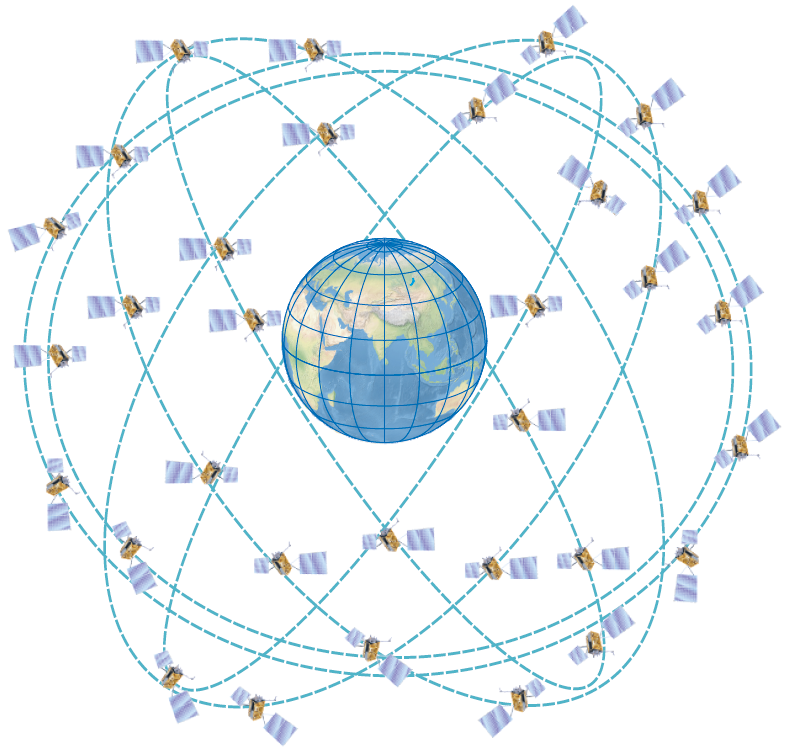 вадцать
четыре спутника вращаются вокруг Земли
на высоте ок. 20 тыс. км. На каждой из шести
орбитальных плоскостей располагается
по четыре спутника. Несмотря на то, что
орбиты точно выверены, ошибки все же
случаются и спутники передают на
приемники GPS навигационные поправки
для обновления альманахов. Навигационные
поправки сообщаются спутникам наземными
станциями, которые непрерывно следят
за их местоположением и скоростью[3].
вадцать
четыре спутника вращаются вокруг Земли
на высоте ок. 20 тыс. км. На каждой из шести
орбитальных плоскостей располагается
по четыре спутника. Несмотря на то, что
орбиты точно выверены, ошибки все же
случаются и спутники передают на
приемники GPS навигационные поправки
для обновления альманахов. Навигационные
поправки сообщаются спутникам наземными
станциями, которые непрерывно следят
за их местоположением и скоростью[3].
Рисунок 1. Орбитальная группировка GPS [7]
Приемник GPS определяет свое положение путем вычисления расстояния до каждого из четырех спутников, точное местоположение которых известно. Каждый спутник передает сигналы; на то, чтобы они достигли приемника, требуется определенное время. Встроенные часы приемника синхронизированы с атомными часами спутников, что позволяет вычислять время прохождения сигналов. Расстояние до каждого спутника вычисляется по времени прохождения сигнала и скорости распространения радиоволн. С помощью метода, называемого триангуляцией, измеренные расстояния объединяются с данными о положении спутников, и это позволяет определить местоположение приемника [3].
Или же рассмотрим геоцентрические системы координат. Их начало сов$ падает с центром (или, точнее говоря, с центром масс) Земли. Глобальная система позиционирования использует прямоугольную (декартову) систему X, Y, Z и эллипсоидальную систему B, L, H. Поясним, о каком эллипсоиде идет речь. Общеземной эллипсоид является самой простой в математическом смысле моделью Земли. Эллипсоид подбирают так, что$ бы его поверхность как можно ближе подходила к поверхности геоида. Геоид можно представить себе как поверхность, совпадающую с невозмущенной поверхностью мирового океана и мысленно продолженную под материками. В строгом определении геоид — это уровневая поверхность, содержащая точку, принятую за начало отсчета высот. В России таковой является нульпункт кронштадтского футштока. Опорными плоскостями в рассматриваемых системах координат являются плоскость экватора и плоскость начального (гринвичского) меридиана. От экватора отсчитывают геодезические широты B. От Гринвича отсчитывают геодезические долготы L. Геодезические высоты H отсчитывают от поверхности эллипсоида по нормали. К этому же эллипсоиду относится и прямоугольная система координат. С осью суточного вращения Земли совпадает малая ось эллипсоида и ось Z, проходящая через северный полюс. Ось X является линией пересечения плоскости экватора и плоскости гринвичского меридиана. Ось Y также лежит в плоскости экватора. Системы спутниковой радионавигации не исключение. Рассмотрим несколько основополагающих идей. А — местоопределение по расстоянию до спутников. Зная координаты навигационных спутников и умея измерять расстояние до них, определить координаты наблюдателя — дело техники. Например, если мы знаем, что от нас до навигационного спутника, скажем, 11 тыс. км, то это значит, что мы находимся где$то на воображаемой сфере радиусом в 11 тыс. км с центром, совпадающим с этим спутником. Если одновременно с этим расстояние до другого спутника составляет 12 тыс. км, то наше местоположение будет где-то на окружности, являющейся пересечением двух таких сфер. И, наконец, знание дальности до третьего спутника сократит количество возможных точек нашего местонахождения до двух, одна из которых будет находиться где-то далеко в космосе (и мы ее отбрасываем), а другая — на земле, рядом с нами. Б — измерение расстояния до спутника. Школьная истина гласит: «расстояние есть скорость, умноженная на время движения». Навигационный приемник так и работает. Он измеряет время, за которое радио$ сигнал доходит от спутника до нас, а затем по этому времени вычисляет расстояние. Главной трудностью при измерении времени прохождения радиосигнала является точное выделение момента его передачи со спутника. Для этого на спутнике и в приемнике в одно и то же время генерируется одна и та же кодовая последовательность. Теперь остается только сравнить время их рассогласования, умножить его на скорость распространения радиоволн, и, казалось бы, дело в шляпе. Однако если спутник и приемник имеют расхождение временных шкал только в одну сотую секунды, то ошибка измерения расстояния составит около 3 тыс. км! В — совершенная временная привязка. Чтобы избежать таких ошибок, на спутнике устанавливают атомные часы, точность которых составляет наносекунды, а стоимость — сотню тысяч долларов. Иметь такие же часы в приемнике — слишком дорогое удовольствие. Однако можно обойтись и простыми часами, если измерять дальность не до трех, а до четырех спутников. В этом случае четыре неточных измерения (с «расстроенными» часами) позволяют исключить относительное смещение шкалы времени приемника. И вот каким образом. Предположим, часы приемника несовершенны, не сверены с единым временем навигационной системы и отстают от него, например, на полсекунды. Если измерить время прохождения сигнала от четырех спутников и получить неистинные или псевдодальности до них, то окажется, что воображаемые сферы с радиусами, соответствующими этим псевдодальностям, не пересекаются в одной точке. Тогда для уточнения дальностей компьютер приемника прибавляет ко всем измерениям (или вычитает) некоторый один и тот же интервал времени до тех пор, пока не найдет решение, при котором все четыре воображаемые сферы пересекаются в одной точке. Г — определение положения спутника в космическом пространстве. Чтобы все вышеизложенное успешно выполнялось, необходимо точно знать местоположение каждого навигационного спутника. Для этого, во-первых, спутники запускают на высокие орбиты (около 20 тыс. км), где движение стабильно и прогнозируемо с большой точностью. А во-вторых, незначительные изменения в орбитах постоянно отслеживаются. При этом сведения о местоположении спутника записываются в па$ мять бортового компьютера и затем передаются на приемник вместе с кодовой последовательностью. Д — коррекция задержек сигнала. Как бы совершенна ни была система, есть несколько источников погрешностей, которые очень трудно избежать. Самые существенные из них возникают при задержке радио$ сигнала в ионосфере (слое заряженных частиц на высоте 120–200 км) и тропосфере (8–18 км) Земли. Величина задержек непостоянна и зависит от солнечной активности и погодных условий [10]